Subtema
3: Características de los actuadores
Interesante, ¿verdad? Los actuadores
son dispositivos muy importantes en la robótica; de ahí la relevancia de
conocer su clasificación. Ahora, en este último subtema, abordaremos las
características de los actuadores. ¡Observa atentamente las imágenes y toma
nota de este contenido!
Tipo 1: Actuador
hidráulico
Los cilindros hidráulicos
tienen varias partes o varios componentes en su construcción interna que hacen
que funcionen de la manera que funcionan. Los componentes de los cilindros
hidráulicos se muestran en la imagen de arriba. Estos son un Barril, Sellos
Hidráulicos, un Vástago, un Ojo del Vástaga si es necesario, un Pistón y un
puerto de entrada y uno de salida. A continuación, mencionamos cuál es la
función de cada uno de ellos dentro del cilindro:
Barril: Aquí
es dónde el aceite entra y sale de los cilindros hidráulicos. Normalmente
cuando el aceite entra por el puerto de entrada, entra a presiones fuertes o
altas, entonces el barril tiene que ser muy resistente, y esa es una de
las razones por las cuales se utiliza un Tubo Honeado.
Sellos Hidráulicos: Los
sellos hidráulicos bloquean el paso del aceite de un lado al otro del Pistón de
los cilindros hidráulicos. O sea que no permiten que el aceite que va entrando
llegue hasta el puerto de salida. El aceite queda bloqueado o
sellado en la parte de los cilindros hidráulicos en dónde tiene que estar.
Vástago: El
Vástago es una Barra Cromada que permite la transmisión de fuerza que se genera
por la presión de entrada de aceite en los cilindros hidráulicos. El aceite
entra en el puerto de entrada y empuja al Pistón, esto hace que el Vástago se
extraiga o de los cilindros hidráulicos con mucha fuerza.
Pistón: El
Pistón o Émbolo de los cilindros hidráulicos es empujado por el flujo de
entrada o de salida dentro del barril, y ya que el Vástago está soldado a
él, cuando el pistón se mueve hacia cada uno de los lados del cilindro el
Vástago se contrae o se extrae.
Estas
son las partes de los cilindros hidráulicos básicos. Hay más cilindros,
unos más complejos en su construcción y unos menos complejos. Sin embargo,
estos componentes son esenciales para casi todos los cilindros hidráulicos, y
es bueno conocer cuáles son y cómo funcionan.
Símbolo:
Tipo 2:
Actuadores neumáticos
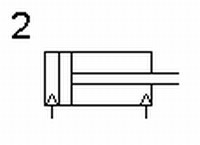
Función de un cilindro neumático
El actuador neumático
consiste en un cilindro cerrado con un pistón en su interior que desliza y que
trasmite su movimiento al exterior mediante un vástago, se compone de las tapas
delanteras y traseras, de la camisa donde se mueve el pistón, del propio
pistón, de las juntas estáticas y dinámicas del pistón y el anillo rascador que
limpia el vástago de suciedad.
Un cilindro de simple efecto
desarrolla un trabajo sólo en un sentido. El émbolo se hace retornar por medio
de un resorte interno o por algún otro medio externo como cargas, movimientos
mecánicos, etc. Puede ser de tipo “normalmente dentro” o “normalmente fuera”.
Los cilindros de simple efecto se utilizan para sujetar, marcar, expulsar, etc.;
tienen un consumo de aire algo más bajo que un cilindro de doble efecto de
igual tamaño. Sin embargo, hay una reducción de impulso debida a la fuerza
contraria del resorte, así que puede ser necesario un diámetro interno algo más
grande para conseguir una misma fuerza.
También la adecuación del resorte
tiene como consecuencia una longitud global más larga y una longitud de carrera
limitada, debido a un espacio muerto. La variedad constructiva de los cilindros
de simple efecto es muy importante, pero todos ellos presentan la misma
mecánica de trabajo.
Símbolo:
![]()
Tipo 3: Actuador
eléctrico
Un actuador lineal eléctrico es
un dispositivo que convierte el movimiento rotatorio de un motor en movimiento
lineal. Se puede integrar en cualquier equipo para empujar, tirar, levantar,
bajar, posicionar o girar una carga.
Partes de un motor eléctrico
Un motor eléctrico tiene dos
elementos esenciales. El primero, es un componente estático que consiste
en materiales magnéticos y conductores eléctricos para generar campos
magnéticos de una forma deseada, al que se le denomina estator.
El segundo, que también está
formado por conductores magnéticos y eléctricos para generar campos magnéticos
de forma que interactúen con los campos generados por el estator, es conocido
como el rotor.
El rotor comprende el
componente móvil del motor, que tiene un eje giratorio para
conectarse a la máquina que se está impulsando y algún medio para mantener un
contacto eléctrico entre el rotor y la carcasa del motor.
En funcionamiento, la corriente
eléctrica suministrada al motor se utiliza para generar campos magnéticos tanto
en el rotor como en el estator. Estos campos se empujan entre sí, con el
resultado de que el rotor experimenta un par y, por consiguiente, gira.
Los motores eléctricos tienen muchas
partes de trabajo diferentes para que puedan girar continuamente,
proporcionando energía según sea necesario. Asimismo, pueden funcionar
con corriente continua (DC) o con corriente alterna (AC), y
ambas tienen sus ventajas y desventajas.
¿Cuáles son los tipos de motores
eléctricos?
Los motores eléctricos se clasifican
principalmente en dos tipos o categorías, dependiendo del tipo de
energía eléctrica aplicada: motores de corriente continua
(DC) y motores de corriente alterna (AC).
Símbolo:
Fuentes:
https://cursosonlineweb.com/partes_de_un_motor_electrico.html
http://infmk2013ricardovazquez.blogspot.com/2014/07/informe-del-mes-de-agosto-2014.html
http://www.ashm.mx/blog/partes-de-los-cilindros-hidraulicos/